Avances en la Locomoción Robótica: Un Nuevo Marco para Terrenos Complejos
Dos investigadores de la Universidad de Leeds y del University College London han desarrollado un innovador marco que permite a los robots transitar por terrenos complejos sin la necesidad de sensores adicionales o entrenamiento previo en terrenos difíciles. En su estudio, publicado en el repositorio arXiv, Joseph Humphreys y Chengxu Zhou presentan una metodología que aprovecha principios de locomoción animal para mejorar la navegación de los robots cuadrúpedos.
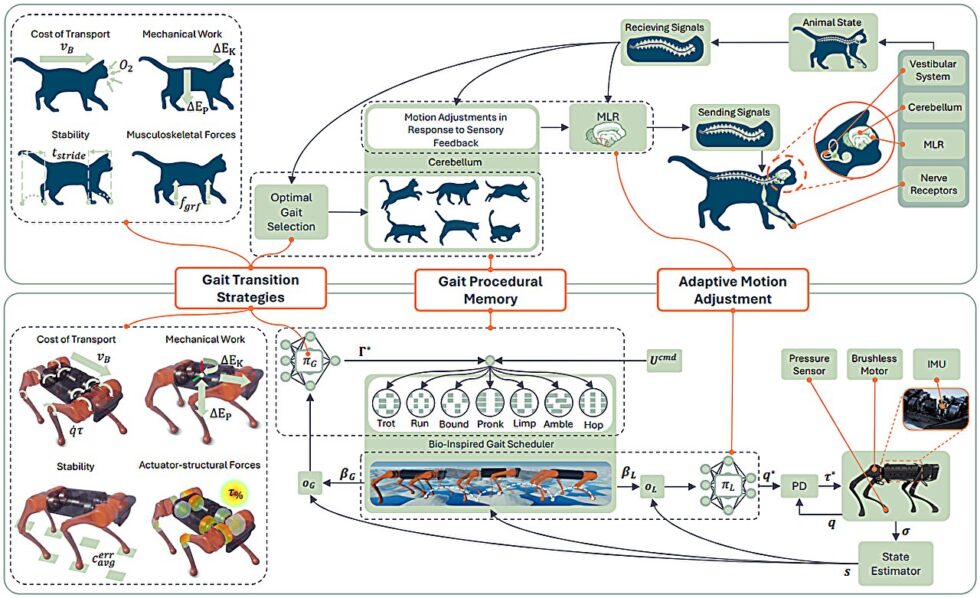
A lo largo de la última década, la programación de robots cuadrúpedos ha evolucionado desde la simple codificación de instrucciones hasta el uso de redes neuronales y técnicas de aprendizaje automático. A pesar de los avances significativos en la mejora de la navegación mediante el entrenamiento por refuerzo profundo, los robots han estado limitados por la dependencia de una única estrategia de marcha. El nuevo enfoque propuesto por los investigadores se inspira en la forma en que los animales de cuatro patas se mueven a través de diferentes tipos de terreno, incorporando la capacidad de adoptar diversas marchas como correr, trotar o saltar, lo que optimiza su efectividad según las condiciones del entorno.
Para facilitar esta adaptación, los científicos han desarrollado un programador de marcha bioinspirado que utiliza un sistema de codificación específico en el espacio observable del robot. Este sistema permite que el robot ajuste su comportamiento motriz en función de las condiciones ambientales que encuentra, permitiéndole aprender y adaptarse incluso en situaciones desconocidas y sin la necesidad de sensores adicionales. Las pruebas realizadas con un robot cuadrúpedo que incorpora este nuevo marco han demostrado su capacidad para navegar con destreza a través de una variedad de terrenos, lo que sugiere que esta tecnología podría ser especialmente útil en escenarios del mundo real donde la imprevisibilidad es la norma.