



Desarrollo de robots magnéticos en Corea del Sur
Científicos de Corea del Sur han logrado crear enjambres de diminutos robots magnéticos que operan de manera similar a las hormigas, lo que les permite llevar a cabo tareas extraordinarias, como transportar objetos que son muchas veces mayores que su propio tamaño. Los hallazgos, publicados en la revista *Device*, indican que estos enjambres de microrobots, que funcionan bajo un campo magnético rotatorio, podrían ser utilizados para realizar tareas complejas en entornos difíciles. Esto incluye la posibilidad de ofrecer tratamientos mínimamente invasivos para arterias obstruidas y la guiado preciso de organismos.
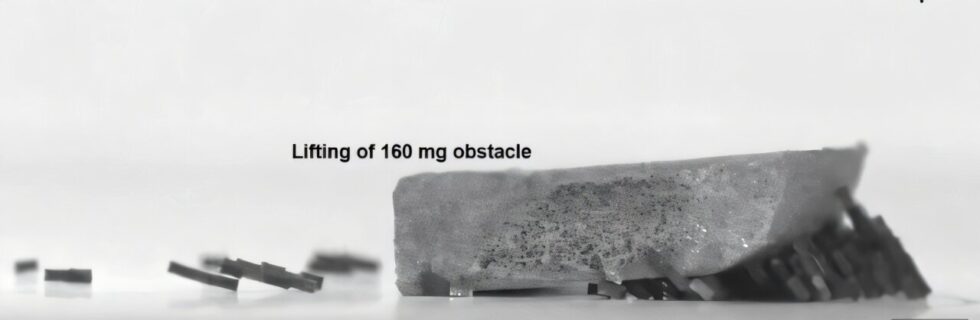
Los investigadores, liderados por Jeong Jae Wie de la Universidad Hanyang en Seúl, llevan a cabo pruebas para evaluar cómo diferentes configuraciones de ensamblaje de los microrobots influencian su rendimiento en diversas tareas. Se ha observado que los enjambres con un alto aspecto de relación de ensamblaje son capaces de escalar obstáculos hasta cinco veces más altos que la longitud de un solo microrobot y pueden lanzarse unos a otros por encima de estos obstáculos. Un enjambre de 1,000 microrobots logró formar una balsa que flotó en el agua, envolviendo una pastilla que pesaba 2,000 veces más que cada robot individual, lo que les permitió transportar el medicamento a través de un líquido.
El avance en la robótica en enjambre ha despertado un creciente interés en la comunidad científica, inspirándose en el comportamiento de las hormigas que trabajan en conjunto para superar obstáculos. Este enfoque colaborativo hace que los robots sean más resistentes a fallos, ya que incluso si algunos miembros del grupo no logran completar la tarea, el resto continúa realizando sus funciones programadas. La investigación se ha centrado en el diseño de microrobots con forma cúbica, que poseen una mayor área de contacto magnético, a diferencia de los robots esféricos utilizados en estudios anteriores. A pesar de los avances prometedores, los investigadores destacan que se requiere un mayor nivel de autonomía en estos enjambres para facilitar su aplicación en situaciones del mundo real, como la navegación autónoma en espacios complejos como las arterias.



