Avances en la Reconstrucción de Escenas para la Conducción Autónoma
Desarrollar vehículos capaces de operar de manera segura sin un conductor humano ha sido un objetivo clave para numerosos equipos en la comunidad de investigación en inteligencia artificial. Dado que probar vehículos autónomos en calles reales sería tanto inseguro como inviable, los algoritmos subyacentes son primero entrenados y evaluados extensamente en simulaciones. A pesar de que las plataformas de simulación han mejorado considerablemente en los últimos años, presentan diversas limitaciones que afectan la precisión y eficacia de las pruebas.
Existen dos tipos de técnicas de simulación: los métodos de bucle abierto, donde las salidas (es decir, las acciones o respuestas de los vehículos simulados) no afectan los datos de entrada futuros, y los métodos de bucle cerrado, en los que las salidas influyen en las entradas posteriores, generando un ciclo adaptativo. Las técnicas de bucle abierto son más fáciles de implementar, pero no se adaptan a cambios o errores cometidos por los modelos evaluados en la simulación. Por su parte, los métodos de bucle cerrado reflejan de manera más precisa situaciones dinámicas del mundo real y pueden evaluar el rendimiento de los sistemas con mayor exactitud, aunque son más exigentes en términos computacionales y no siempre logran representar maniobras complejas y nuevas trayectorias de vehículos.
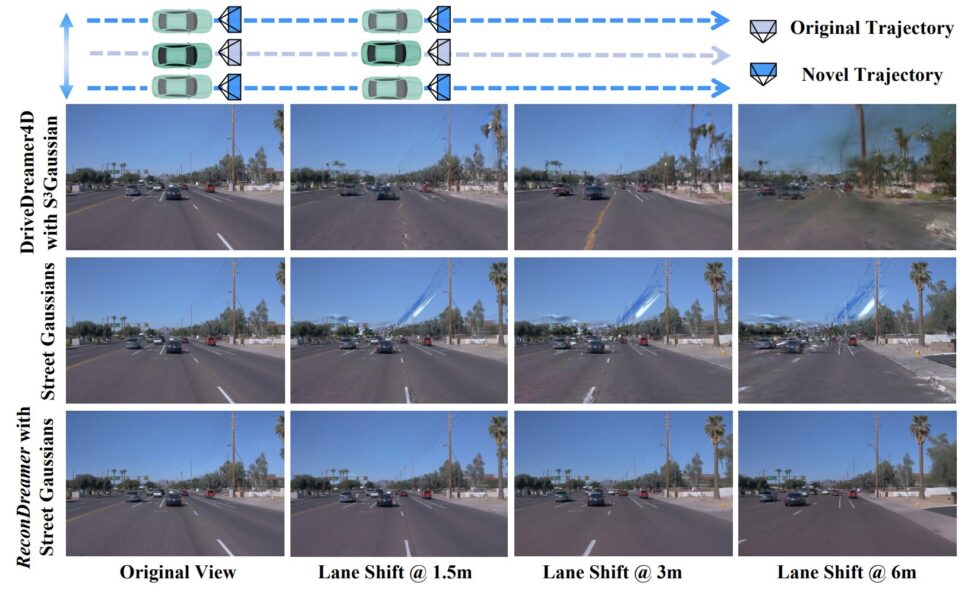
Investigadores de GigaAI, la Universidad de Peking, Li Auto Inc. y CASIA han desarrollado recientemente un nuevo método que podría mejorar la reconstrucción de escenas de conducción en simulaciones. Este método, descrito en un artículo publicado en el servidor de preprints arXiv, se basa en la integración incremental de conocimientos provenientes de modelos del mundo de la conducción autónoma en las escenas simuladas. Los autores del estudio destacan que la simulación de bucle cerrado es crucial para el desarrollo de la conducción autónoma de extremo a extremo, indicando que los métodos de simulación de sensores existentes enfrentan dificultades al intentar reproducir trayectorias novedosas, como los cambios de carril.
El objetivo principal de esta investigación fue desarrollar una metodología que mejore la representación de maniobras complejas. La solución propuesta, denominada ReconDreamer, junto con Drive Restorer, se centra en entrenar modelos del mundo para mitigar progresivamente los efectos no deseados en la representación de maniobras de conducción complejas. Los primeros resultados de las pruebas realizadas indican que ReconDreamer no solo mejora la calidad de las reconstrucciones de escenas que muestran maniobras complejas, sino que también optimiza la coherencia espaciotemporal de los elementos dentro de una escena. Este avance podría tener un impacto significativo en la formación y evaluación de modelos computacionales para la conducción autónoma, así como inspirar el desarrollo de técnicas similares en otras áreas de la robótica y aplicaciones tecnológicas.