El desafío del trabajo en equipo en los enjambres de microrobots
La coordinación de tareas en grupo, ya sea entre personas o robots, plantea un reto significativo: asegurar que cada miembro aporte de manera equitativa al esfuerzo colectivo. Este dilema se agrava en el ámbito de los microrobots, donde la escala de trabajo es tan diminuta que la distribución de responsabilidades se convierte en una tarea compleja. Un estudio reciente, publicado en la revista *Science Robotics* y liderado por Clemens Bechinger de la Universidad de Konstanz, ha abordado esta problemática mediante el desarrollo de un sistema que permite reconocer y optimizar las contribuciones individuales dentro de un enjambre de microrobots.
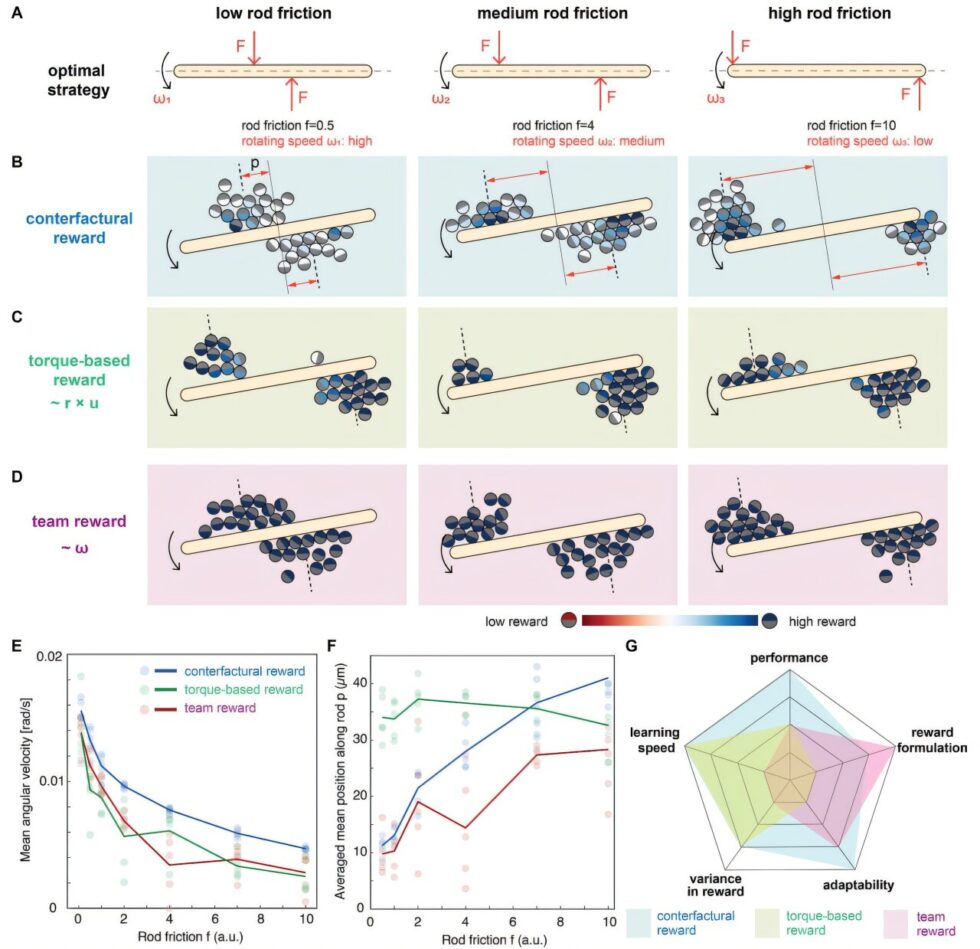
El trabajo del equipo de Bechinger se centra en microrobots propulsados por puntos láser, que deben colaborar para ejecutar tareas complejas. Sin un sistema justo que asigne el mérito a cada robot, existe el riesgo de que algunos se vuelvan inactivos, perjudicando el rendimiento global del enjambre. Para mitigar este riesgo, los investigadores implementaron un algoritmo de aprendizaje automático combinado con un método especial que estima la contribución de cada microrobot. Este enfoque ayuda a evitar el «problema del agente perezoso», que puede surgir en tareas colectivas cuando no se reconoce adecuadamente el esfuerzo individual.
Los «recompensas contrafactuales» empleadas en el estudio permiten a cada microrobot recibir reconocimiento por su participación, lo que a su vez proporciona al enjambre indicadores para mejorar su distribución de fuerzas de manera autónoma. Según Bechinger, «nuestros hallazgos demuestran que, incluso en un enjambre de microrobots, es crucial reconocer y optimizar las contribuciones individuales para lograr los mejores resultados». Este avance no solo mejora la eficiencia de los enjambres microrobóticos, sino que también ofrece una nueva perspectiva sobre cómo optimizar el trabajo en equipo en cualquier sistema colectivo. La investigación abre nuevas posibilidades para la aplicación de microrobots en campos como la medicina y la monitorización ambiental, donde el control preciso y la coordinación son fundamentales.